
У сучасній літературі, присвяченій спільній оптимізації сигналізації на перехрестях та траєкторій підключених автоматизованих транспортних засобів (CAV), основна увага приділяється руху транспортних засобів, а на пішоходів звертається мало або зовсім не звертається увага. У цій статті представлена методологія безпечного включення пішоходів у регульовані перехрестя з CAV і підключеними транспортними засобами, керованими людиною (CHV). Рух транспортних засобів контролюється як за допомогою світлофорів, так і мобільних контролерів CAV під час введеної нами нової "білої фази". CAV ведуть колони CHV через перехрестя, коли активні білі фази. Окрім оптимізації траєкторій CAV, модель оптимально вибирає стан світлофора між білими та зеленими сигналами для руху транспортних засобів, а також інтервали "йти" та "не йти" для руху пішоходів. Методологія, заснована на відступаючому горизонті, використовується для врахування стохастичної природи проблеми та зменшення обчислювальної складності. Результати дослідження показують успішну роботу груп, що складаються з пішоходів, CAV та CHV з різним рівнем попиту через ізольовані перехрестя. Результати також показують, що збільшення рівня проникнення CAV на ринок може зменшити середню затримку на перехресті до 27%. Більше того, середні затримки пішоходів, CHV і CAV зменшуються зі збільшенням CAV і досягають мінімальних значень за повного використання CAV. Крім того, наявність білої фази може зменшити середню затримку на перехресті до 14,7%.
Вступ
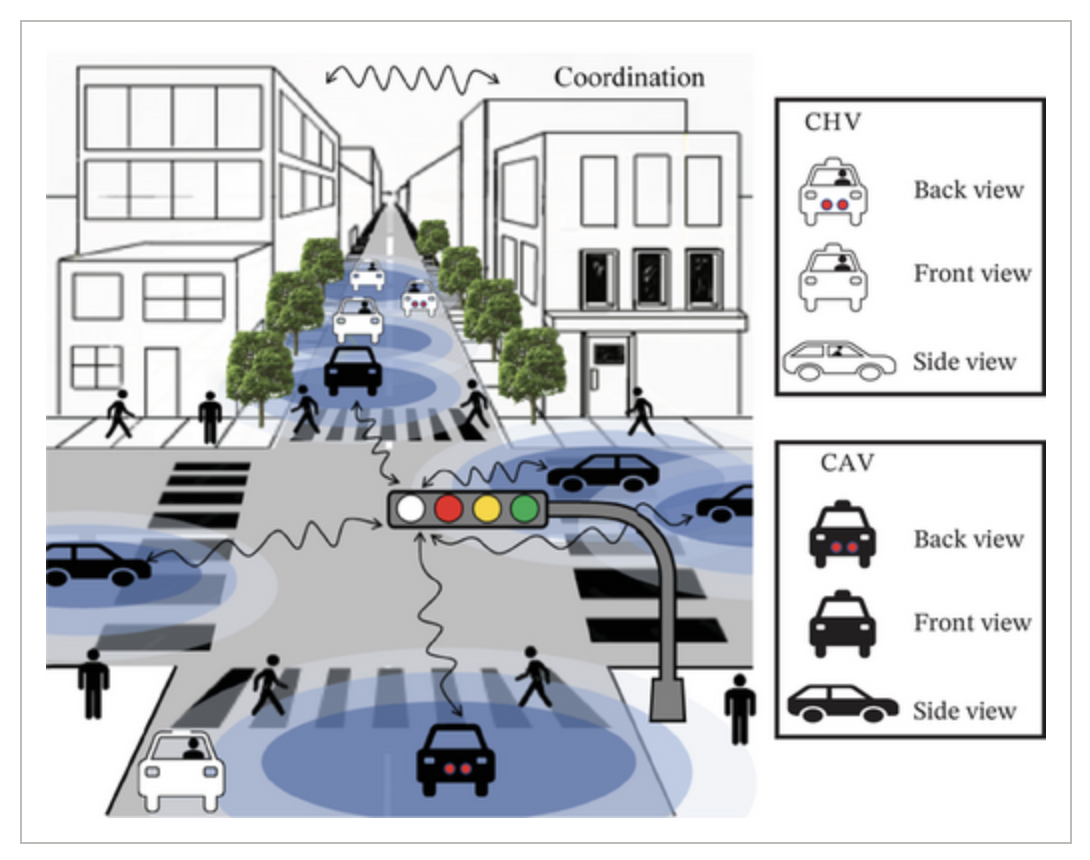
Останні досягнення в електрифікації, підключенні, автоматизації та обчислювальних технологіях відкривають можливості для покращення управління дорожнім рухом і підвищення безпеки. Ідентифікація та належне управління вузькими місцями, такими як інциденти і робочі зони, можуть значно покращити роботу транспорту і підвищити безпеку. Регульовані перехрестя, як вузькі місця транспортних мереж, можуть отримати користь від таких технологій. Ці переваги можуть бути реалізовані шляхом інтеграції інформації про транспортні засоби в реальному часі в методи оптимізації сигналів. Інтегрована оптимізація траєкторії підключених автоматизованих транспортних засобів (CAV) і часу сигналів для флоту з 100% CAV може привести до подальшого зниження затримок на перехресті. Потоки руху, що складаються виключно з CAV, надають можливість використовувати логіку перехресть без світлофорів, що може забезпечити максимальну пропускну здатність перехрестя. Проте повністю автоматизоване середовище CAV навряд чи буде досяжне в найближчому майбутньому. Тому підготовка інфраструктури та методів управління рухом до періоду спільного існування CAV та підключених транспортних засобів, керованих людьми (CHV), є критично важливою. Деякі дослідження спільно оптимізували рухи CAV і сигнали на перехрестях у частково автоматизованих середовищах. Ці дослідження використовують традиційні зелені та червоні сигнали для керування потоком руху. Однак дослідження показують, що потоки руху з достатнім рівнем проникнення CAV можна контролювати за допомогою управління рухом CAV. Тому була запропонована "білу" фазу, яка змушує групи CHV слідувати за CAV для проходження перехрестя одночасно з протилежних смуг руху. Під час білих фаз CAV контролюються оптимально для забезпечення безпеки флоту, тоді як CHV повинні слідувати за своїми попередніми транспортними засобами. Ці дослідження здебільшого зосереджуються на оптимізації руху транспортних засобів, приділяючи мало або зовсім не приділяючи уваги руху пішоходів. Деякі існуючі дослідження непрямо враховували пішоходів, встановлюючи нижні межі для зеленого сигналу транспортних засобів. Нещодавно розробили автономну систему управління перехрестями, яка враховує як рух транспортних засобів, так і пішоходів. Однак вони припустили, що повністю автоматизований флот транспортних засобів буде доступний в найближчому майбутньому.
Хоча існує багатий обсяг літератури, що зосереджується на спільній оптимізації часу сигналів на перехрестях та траєкторій CAV, більшість існуючих досліджень або ігнорують рух пішоходів, або враховують їх непрямо, встановлюючи мінімальний час зеленого сигналу для транспортних засобів. Це дослідження представляє нову методологію, яка явно інтегрує сигнали та рух пішоходів у регульовані перехрестя в умовах змішаної автономії за наявності білої фази. Під час білої фази CAV діють як мобільні контролери трафіку, безпечно ведучи колони CHV через перехрестя з конфліктуючих смуг одночасно. Зазначимо, що можуть використовуватися інші статуси сигналів, такі як миготливий зелений, щоб уникнути плутанини для водіїв, і, звичайно, польові випробування, вдосконалення політики та зворотний зв'язок від користувачів дороги є необхідними перед будь-яким впровадженням. Пішоходи отримуватимуть свої специфічні сигнали "йти"/"не йти", при цьому жоден конфліктний рух транспортних засобів не дозволяється проходити через перехрестя. Сформульовано змішану нелінійну програму (MINLP), яка знаходить оптимальні прискорення CAV та плани часу сигналів як для транспортних засобів, так і для пішоходів. Рух CHV оцінюється за допомогою налаштованої моделі слідування за автомобілем. Запропоноване формулювання проблеми є обчислювально складним через наявність нелінійних термінів і величезного простору станів. Тому техніка рішення спочатку лініаризує нелінійні терміни у формулюванні проблеми, а потім вбудовує їх у систему з відступаючим горизонтом. Для перевірки методології використовується ізольоване перехрестя з трьома рівнями попиту. Кожен випадок симулюється з п'ятьма рівнями проникнення CAV на ринку (MPR), що варіюються від 0% до 100% з кроком 25%, для аналізу впливу MPR CAV на безпеку та мобільність на перехресті.
Оптимізація траєкторій CAV та часу сигналів
P. T. Li і Zhou запропонували гібридну структуру для спільної оптимізації траєкторій CAV і часу сигналів на перехресті. Вони вирішили цю задачу за допомогою послідовного алгоритму розгалужень і обмежень. Їх результати показують зменшення середньої затримки на 4,2% у випадку з 5% проникненням CAV на ринку, порівняно з попередньо налаштованим контролем. Була розроблена двохрівнева структура для спільної оптимізації руху CAV і сигналів на перехресті за наявності різних технологій транспортних засобів, від автомобілів, керованих людьми (HVs), до CAV. Верхній рівень методології використовує техніку перерахунку для підрахунку всіх можливих порядків роботи природно виникаючих колон, тоді як нижній рівень перетворює ці порядки роботи в часи фаз сигналів, формує належний профіль швидкості для транспортних засобів і розраховує відповідні затримки для кожного порядку. Нарешті, обирається і реалізується порядок роботи, пов'язаний із найменшою затримкою. Результати їх кейс-стаді на ізольованому перехресті показують, що загальна затримка на перехресті та кількість зупинок зменшуються зі збільшенням проникнення CV. Також була запропонована методологія, яка регулює адаптивний контроль сигналів для максимізації використання зеленого часу. Методологія використовує правило-базовану структуру для визначення допустимого набору параметрів часу сигналів з урахуванням часів прибуття всіх транспортних засобів. Щоб зменшити обчислювальну складність проблеми, вони формують колони транспортних засобів і мінімізують тільки затримки лідерів CAV. Їх числові результати на ізольованому перехресті показують зменшення середньої затримки на перехресті на 28%–52%, порівняно з повністю активованим контролем перехрестя. Двохрівнева структура була розроблена для спільної оптимізації траєкторій CAV та планів часу сигналів у середовищі змішаної автономії. Ця структура використовує динамічне програмування на верхньому рівні для знаходження близько оптимального набору параметрів часу сигналів. Нижній рівень потім використовує евристику стрільби для побудови/оцінки траєкторій транспортних засобів на основі наданого плану часу сигналів. У порівнянні з адаптивним контролем сигналів, ця структура може зменшити середній час подорожі на 35,7% і витрати пального на 31,5%. Інша двохрівнева структура оптимізації, яка була запропонована, спільно оптимізує траєкторії CAV та плани часу сигналів на перехресті. Структура займається оптимізацією сигналів на вищому рівні (макроскопічний рівень) з метою мінімізації затримки. Нижній рівень (мікроскопічний рівень) оптимізує траєкторії транспортних засобів для знаходження набору траєкторій з найменшими витратами пального. Їх числові експерименти показують зменшення витрат пального на 6%–14,5% з 20% проникненням CAV, порівняно з Кооперативним Адаптивним Круїз-Контролем з фіксованим часовим сигналом. Методологія на основі Лагранжевої релаксації для розв'язання інтегрованої задачі оптимізації сигналів і траєкторій розкладає проблему на рівні перехрестя на підпроблеми рівня смуги, які набагато простіше вирішувати. Запропонована методологія може знаходити рішення з розривами подвійності не більше 0,1%, зменшуючи середню затримку на 5%–51%, порівняно з адаптивним контролем перехрестя.
Обговорені дослідження можуть надати оптимальні параметри часу сигналів і руху CAV для змішаних флотів автономії. Однак вони не можуть забезпечити одночасне управління конфліктуючими рухами, навіть коли колона повністю складається з CAV. Тому деякі дослідники розробили нові підходи для одночасного управління конфліктуючими рухами в умовах змішаної автономії. Була запропонована методологія для одночасного управління конфліктуючими рухами для флоту змішаної автономії. Кожен CAV має надіслати запит контролеру перехрестя, в той час як інфраструктура передбачається як така, що ідентифікує транспортні засоби, керовані людьми (HV), і надсилає віртуальний запит від їхнього імені. HV дозволено проходити через перехрестя, якщо або вони мають найвищий пріоритет серед транспортних засобів, що зупинилися за стоп-лінією, або їм призначено віртуальну колону для слідування за CAV. Зазначимо, що контролер перехрестя спілкується з HV за допомогою зелених і червоних сигналів. Ця структура надає можливість одночасного управління протилежними рухами; однак використання підходу на основі пріоритетів може призвести до субоптимальних рішень. Також була представлена фаза, присвячену CAV, яку назвали "синьою" фазою. CAV можуть входити на перехрестя або під час зелених часів, або під час синіх часів через смуги, призначені тільки для CAV, з протилежних смуг одночасно. Зазначимо, що HV можуть отримати доступ до перехрестя тільки під час зелених часів. Їх числові експерименти на мережі з 25 перехресть показали, що їх запропонована методологія перевершує сучасні методи контролю перехресть, коли проникнення CAV на ринку перевищує 60%.
Контроль перехрестя з білою фазою
Було запропоновано додати нову фазу (білу фазу) до регульованих перехресть, щоб дозволити CAV формувати групи, що складаються з нуля або більше CHV, і безпечно вести їх через перехрестя з конфліктуючих смуг під час цієї нової фази. Кожна група транспортних засобів починається з CAV як лідера групи транспортних засобів і продовжується до наступного CAV або останнього CHV на смузі. Наприклад, Транспортний засіб 2 та Транспортні засоби 3–6, показані на Малюнок 1, формують дві групи транспортних засобів. Перша група транспортних засобів складається лише з Транспортного засобу 2, який є CAV без слідуючого CHV. Друга група транспортних засобів містить Транспортні засоби 3 до 6, де Транспортний засіб 3 служить лідером. Зазначимо, що безпека всіх членів групи транспортних засобів забезпечується оптимальним контролем траєкторії її CAV-лідера, і CHV повинні лише слідувати за своїми безпосередньо передніми транспортними засобами під час білих фаз.
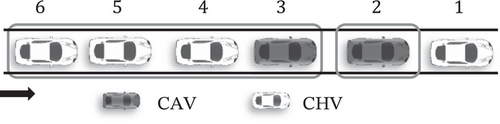
Малюнок 1. Зразок групи транспортних засобів.
На відміну від традиційного зеленого сигналу, білий сигнал може бути призначений конфліктуючим смугам одночасно, коли є достатньо CAV для забезпечення безпеки змішаного флоту. Наприклад, розглянемо перехрестя, показане на Малюнку 2, з лише двома односмуговими напрямками. У відсутності білої фази контролер перехрестя має надати зелений сигнал одному з рухів, перейти через сигнали переходу (всі червоні та жовті) і потім управляти іншими рухами під час зеленої фази. Однак призначення білої фази для обох напрямків дозволяє контролеру перехрестя безпечно управляти групами транспортних засобів з конфліктуючих смуг одночасно. Таким чином, не буде втрат часу на перехід активної смуги. Крім того, безпека буде забезпечена шляхом коригування швидкості лідерів CAV замість зупинки транспортних засобів за червоним сигналом для збереження безпеки.
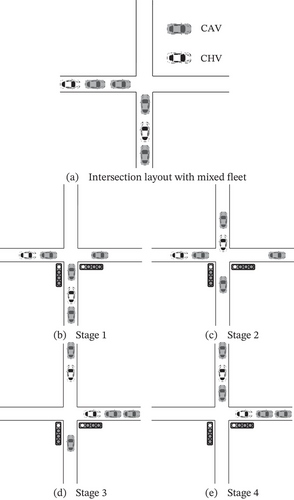
Малюнок 2. Приклад перехрестя з різними стадіями керування білою фазою.
Зазначимо, що біла фаза активується лише тоді, коли флот має достатню кількість CAV; в іншому випадку використовуються зелені, жовті та червоні сигнали. Тому результати контролю перехрестя з білою фазою будуть подібні до оптимізованого контролю перехрестя тільки з зеленими сигналами при низьких рівнях проникнення CAV. З іншого боку, перехрестя буде працювати так само, як і перехрестя без сигналів при високих рівнях проникнення CAV.
Числові експерименти на ізольованому перехресті показали, що загальна затримка зменшилася до 96,2% при рівнях проникнення CAV від 0% до 100% у порівнянні з регульованим перехрестям з повністю активованим контролем.
Спільна оптимізація траєкторій та сигналів з пішоходами
Дослідження, обговорені раніше, представляють ефективні способи контролю сигналів на перехрестях і руху CAV у транспортних потоках автономних і керованих людьми транспортних засобів. Однак вони не враховують рух пішоходів у своїх формулюваннях. Є інша група досліджень, що розглядає взаємодію між окремими CAV і пішоходами без урахування оптимізації часу сигналів.
Лише кілька досліджень враховують спільну оптимізацію траєкторій CAV і часу сигналів за наявності пішоходів. Була запропонована схема управління рухом на основі підключених транспортних засобів, яка використовує реальні швидкості і місця транспортних засобів, а також прибуття пішоходів як вхідні дані для мінімізації зваженої середньої затримки транспортних засобів і пішоходів. Вони використовували послідовний генетичний алгоритм для ефективного розв'язання проблеми. Їх числові експерименти показали, що методологія є ефективною тільки якщо рівень виявлення пішоходів перевищує 60%. Інша система управління автономним перехрестям враховує як рух транспортних засобів, так і пішоходів і може забезпечити максимальну пропускну здатність при використанні в комбінації з контролем максимального тиску. Це дослідження передбачає флот повністю автономних транспортних засобів і, отже, використовує доступний алгоритм оптимізації траєкторій для надання траєкторій транспортних засобів. Результати кейс-стаді, проведеного на мережі з 49 перехрестями, показують, що затримки пішоходів і транспортних засобів мають негативну кореляцію.
Висновок
Останні досягнення в технології CAV недостатньо відображені в літературі з оптимізації сигналів на перехрестях за наявності пішоходів. Існуючі дослідження в основному зосереджені на спільній оптимізації траєкторій CAV і планів сигналізації та мало або зовсім не приділяють уваги пішоходам. Деякі дослідження побічно враховували пішоходів, встановлюючи мінімальний час зеленого сигналу для транспортних засобів. Хоча кілька досліджень спільно оптимізували сигнали та траєкторії як для транспортних засобів, так і для пішоходів у повністю автономних середовищах, це питання недостатньо вивчене в умовах змішаної автономії.
За матеріалами onlinelibrary.wiley.com
Компанія СЕА з 2007 року займається розробкою та виробництвом сучасної високотехнологічної світлофорної продукції, яка виготовляється на базі власного виробництва світлофорів з використанням сучасного обладнання і останніх технологій. Кваліфіковані фахівці розробляють проєкти АСКДР і організації дорожнього руху, здійснюють проєктування і будівельні роботи для світлофорних об'єктів. Компанія має всі необхідні ресурси для будівництва та монтажу світлофорних об'єктів; проведення робіт виконується згідно ГОСТів і правил.
 Щоб купити світлофори і технічні засоби управління дорожнім рухом, а також для отримання додаткової інформації звертайтеся до Компанії СЕА за тел. +380 (44) 330-00-88 або пишіть нам на info@sea.com.ua
Щоб купити світлофори і технічні засоби управління дорожнім рухом, а також для отримання додаткової інформації звертайтеся до Компанії СЕА за тел. +380 (44) 330-00-88 або пишіть нам на info@sea.com.ua
Похожие новости





Войдите или зарегистрируйтесь